Abstract
Robot teleoperation enables human control over robotic systems in environments where full autonomy is challenging. Recent advancements in low-cost teleoperation devices and VR/AR technologies have expanded accessibility, particularly for bimanual robot manipulators. However, transitioning from in-person to remote teleoperation presents challenges in task performance.
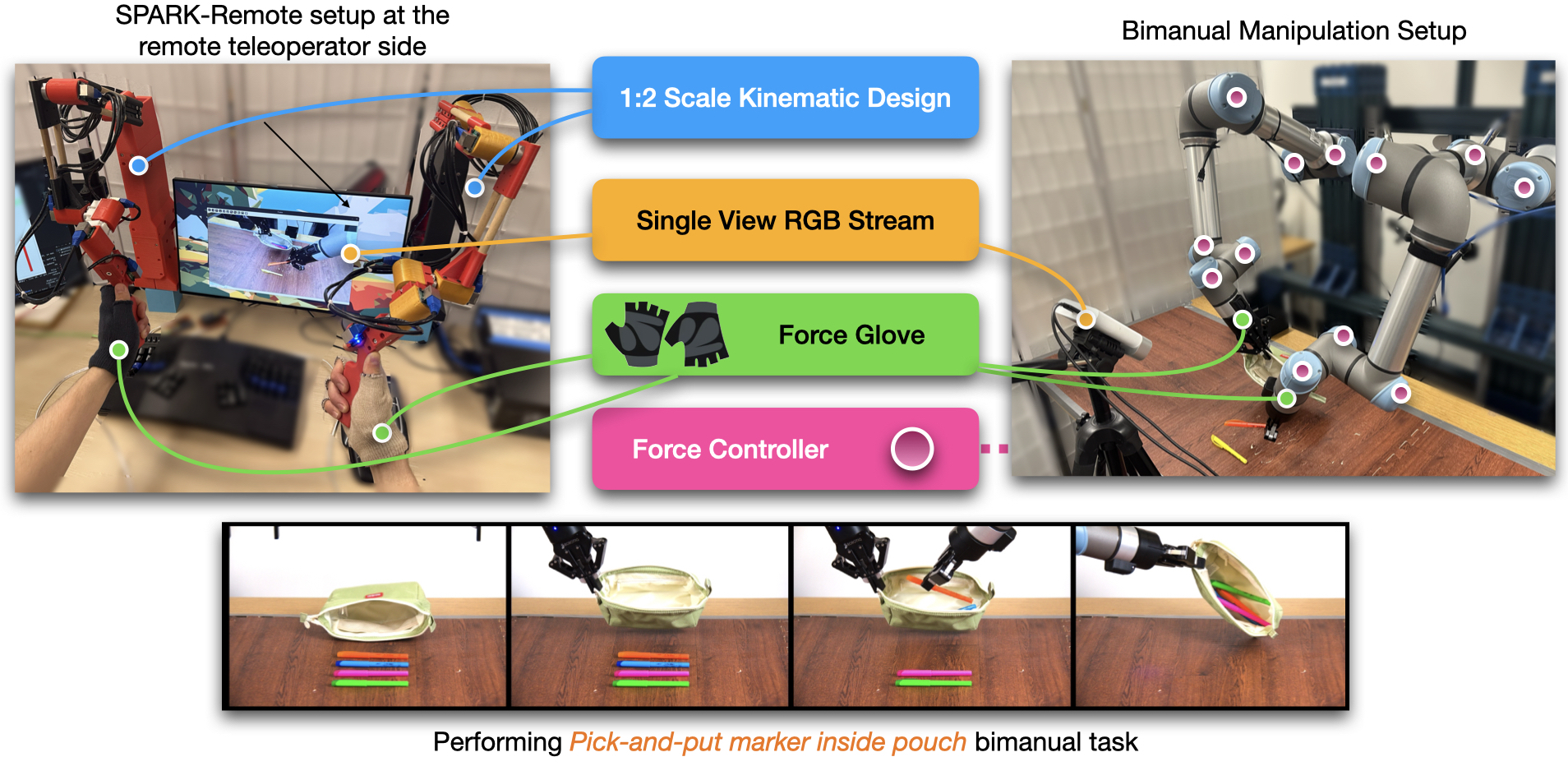
We introduce SPARK, a kinematically scaled, low-cost teleoperation system for operating bimanual robots. Its effectiveness is compared to existing technologies like the 3D SpaceMouse and VR/AR controllers. We further extend SPARK to SPARK-Remote, integrating sensor-based force feedback using haptic gloves and a force controller for remote teleoperation. We evaluate SPARK and SPARK-Remote variants on 5 bimanual manipulation tasks which feature operational properties - positional precision, rotational precision, large movements in the workspace, and bimanual collaboration - to test the effective teleoperation modes. Our findings offer insights into improving low-cost teleoperation interfaces for real-world applications.
Methods
Experimental Setup
The SPARK-Remote system was evaluated on a bimanual robot teleoperation setup featuring two UR5e manipulators with force/torque sensors at the end effectors. The system was tested under four different teleoperation modes: SpaceMouse, VR controllers, SPARK, and SPARK-Remote, across five bimanual tasks requiring precision, large movements, and coordination.
Hardware Design
The SPARK system utilizes a scaled kinematic model with custom rotary joints and high-resolution encoders. It includes a force glove with six vibration motors for haptic feedback and a force controller to regulate joint torques, reducing excessive forces during remote operation.
Teleoperation Network
For remote operation, we used ROS2 and WebRTC to transmit joint angles and force feedback data at 30 Hz. A single-view RGB camera provided the operator with visual feedback, ensuring real-time control while minimizing latency.
Task Evaluation
Each teleoperation method was tested by an expert operator across five tasks, including pick-and-place, object manipulation, and knot untying. Task performance was measured by completion time and number of emergency stops (e-stops), with remote variants incorporating force feedback and compliance mechanisms to improve efficiency.
Tasks
Bag - Basic
Bag - FC
Bag - FG
Bag - FGC
Chess - Basic
Chess - FC
Chess - FG
Chess - FGC
Handover - Basic
Handover - FC
Handover - FG
Handover - FGC
Knot - Basic
Knot - FC
Knot - FG
Knot - FGC
Markers - Basic
Markers - FC
Markers - FG
Markers - FGC
Results

Conclusion
This work introduces SPARK-Remote, a low-cost and effective teleoperation system for bimanual robots, addressing key challenges in remote robot control. Through a comparative evaluation against existing teleoperation technologies and a structured set of bimanual tasks, the system demonstrated significant performance benefits, particularly when incorporating force feedback and force control mechanisms. The findings highlight that while remote teleoperation inherently presents challenges, haptic feedback and adaptive force regulation can bridge the gap between in-person and remote operation.
The success of SPARK-Remote suggests promising directions for future teleoperation research. Expanding the system to include multi-modal feedback (e.g., audio cues, visual overlays) and enhanced force modeling could further improve its usability and performance. Additionally, its open-source nature paves the way for further refinements and community-driven improvements.
In conclusion, SPARK-Remote provides a practical, scalable, and cost-effective solution for improving bimanual robot teleoperation, particularly in scenarios where traditional high-cost systems are impractical. By combining affordability with intuitive control enhancements, this work contributes to the ongoing effort to make robot teleoperation more accessible, efficient, and user-friendly across diverse applications.
Force Controller Intuitions
For a detailed explanation of the code behind the force controller, please refer to the following page.
Force Controller